Основные задачи устройств автоматической переездной сигнализации (АПС):
1) обеспечение безопасности движения поездов при помощи известных средств СЦБ;
2) минимальная длительность простоя автомобильного или другого транспорта перед закрытым
переездом.
Однако методы и результаты решения второй задачи не всегда оптимальны, что объясняется следующими обстоятельствами
Включение АПС должно осуществляться с момента вступления поезда на выбранный участок приближения длиной Lnp при максимально возможной скорости его движения Vnмакс. В качестве участка приближения могут выступать различные участки пути, количественно отличающиеся при различном расположении переезда. При расположении переезда по выходу станции длина участка приближения может не соответствовать оптимальной, при которой достигается минимум длительности закрытого состояния переезда. Эти два фактора определяют необходимость анализа возможностей оптимизации функционирования АПС.
Разработанный в НПЦ «Промэлектроника» при УрГУПС комплекс технических средств, основанный на применении электронной системы счета осей (КТС ЭССО), обладает широкими функциональными возможностями применения в различных системах СЦБ. Определим новые возможности КТС ЭССО применительно к устройствам АПС.
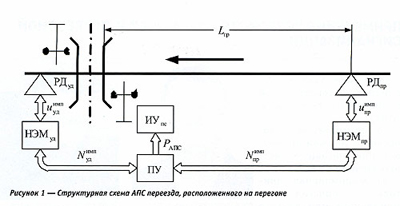
Функционально-структурная схема устройств КТС ЭССО для АПС с расположением переезда на перегоне приведена на рис. 1 для нее обозначения соответствуют: РДпр и РДуд — рельсовые датчики, фиксирующие вступление поезда на участок приближения и его освобождение от подвижного состава соответственно; НЭМпр и НЭМуд — напольные электронные модули, преобразующие аналоговые сигналы u имппр и u импуд , полученные от соответствующих рельсовых датчиков, в импульсы счета осей подвижного состава N имппр и N импуд; ПУ — постовое устройство, осуществляющее сравнение данных, полученных от НЭМпр, и НЭМуд, в результате чего его выходной сигнал Рапс управляет работой исполни- тельного устройства ИУпс, осуществляющего закрытие или открытие переезда; Lnp — длина участка приближения.
На рис. 2 приведена функционально-структурная схема АПС переезда, расположенного по выходу станции, где участком приближения является участок длиной L вых .
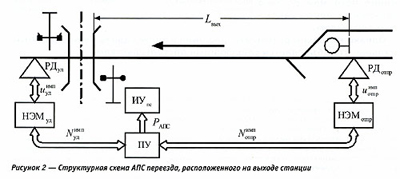
Выходной сигнал Рапс управляет работой исполнительного устройства переездной сигнализации ИУпс. Примем, что состояние выхода ПУ системы, равное Рапс =0, означает выдачу в ИУпс сигнала на закрытие переезда, а при Рапс=1 переезд должен быть открыт. Тогда показанная система АПС ЭССО реализует следующую логическую функцию:
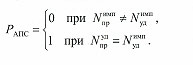
Если переезд расположен на перегоне, то длина участка приближения, при вступлении поезда на который начинается действие АГIС, определяется выражением [3]
L пр пер =0,278 V п макс ( k ср +0,72 l пер ){м] (2)
где Vп макс — максимальная скорость наиболее быстроходного поезда, обращающегося на участке дороги (км/ч); l пер — длина переезда, измеряемая вдоль железнодорожного пути (м); k ср — коэффициент, учитывающий длительность времени срабатывания устройств СЦБ АПС, время освобождения переезда автомобильным транспортом при его минимальной скорости движения и время полного опускания автошлагбаума или подъема УЗП.
Здесь численные значения соответствуют: k ср = 35 для переездов с автоматической светофорной сигнализацией и с автошлагбаумами, k ср = 45 для переездов с автоматической оповестительной сигнализацией.
Очевидно, что подобная реализация АПС далека от оптимальной, так как при реальной скорости движения приближающегося поезда Vп< Vп макс простой автомобильного транспорта перед закрытым переездом может быть необоснованно большим.
Большая степень неоптимальности функционирования АПС возникает, например, когда переезд располагается на выходе станции. Эта ситуация изображена на рис. 2, где в общем случае переезд может находиться как в пределах станции, так и на перегоне. Здесь возможны различные алгоритмы работы АПС.
Первый из них имеет место, когда расстояние от выходного светофора до переезда L вых ≥ L пр пер где L пр пер определяется из (2). Тогда алгоритм работы АПС аналогичен рассмотренному выше случаю расположения переезда на перегоне, то есть извещение на переезд подается с момента вступления поезда за выходной светофор. Реальное время извещения, то есть интервала времени от начала действия АПС до вступления поезда на переезд, определится
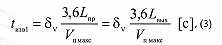
где ∂ v = Vnмакс/ Vnср относительная скорость движения поезда приближения к переезду; Vch = fv ( V нач’ V кон) — усредненная скорость движения поезда по участку приближения, а V нач и V кон — начальная и конечная скорости движения поезда. Функция fvимеет нелинейный вид, она определяется из результатов тяговых расчетов для соответствующих видов поездов и путевых параметров участка пути. При этом АПС функционирует одинаково как для безостановочного движения поезда по выходному светофору, так и при трогании его с места. Когда V нач= 0, то будет иметь место неравенство Vn ср
Второй алгоритм соответствует неравенству L вых < L пр пер.Для выполнения условий безопасности движения началом передачи извещения на АПС при открытом состоянии выходного светофора является момент вступления поезда на путь отправления, и длина участка приближения L пр = L вых + L отпр , где L отпр — длина пути отправления или другого станционного участка пути перед выходным светофором. В соответствии с этим будем иметь
и обязательным является выполнение условия ( L вых + L отпр ) ≥ L пр пер, где длина L пр пер находится из выражения (2).
Третий вариант работы алгоритма имеет место также при L вых < L пр. Он характеризуется тем, что если вначале поезд следует на запрещающее показание выходного светофора, то применяется фиксированная временная задержка t зад на его последующее открывание, которая определяется скоростью Vn макс. Если исходить из экстремального случая, когда движущийся поезд находится непосредственно перед закрытым выходным светофором, то требуемое время задержки должно быть равно

где длина L пр пер находится из выражения (2).для этого случая максимальная длительность времени извещения будет иметь место в том случае, когда поезд вступает на путь отправления и одновременно с этим дежурный по станции открывает выходной светофор,

Здесь, так же как и в (4), требуется соблюдение обычно выполняемого условия ( L вых + L отпр ) ≥ L пр пер
Как видно из уравнений (3), (4) и (6), при заданной нормированной максимальной скорости движения поездов Vn макс параметром, определяющим изменение времени t изв является относительная скорость 6. Причем имеется линейная зависимость величины от изменения ∂ v . Минимальное значение t изв, будет иметь место при Vn ср=Vn макс что, однако, почти не выполняется на практике. Уменьшение скорости Vn срвызывает увеличение времени t изв и обусловливает соответствующее нерациональное возрастание длительности закрытого состояния переезда с увеличением времени простоя автотранспорта.
На графиках рис. З показаны примеры расчета функции t изв = f (∂ v ) для трех рассмотренных случаев расположения переезда относительно станции отправлени ( t изв1, t изв2 и t изв3), соответствующие полученным выражениям (3), (4) и (6).
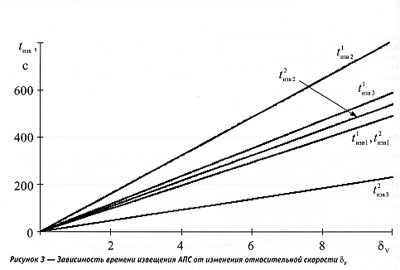
Приняты следующие величины аргументов функций длина участка приближения переезда, рассчитанна по (2) для k ср = 45; Lпр= 20 м и двух значений максимальной скорости движения поезда V1 n макс = 80 и V2 n макс= 120 км/ч, равна L1пр пер= 1089 и L2пр пер = 1633м соответственно [3]. Тогда для построения графиков по выражению (3) будем иметь следующие два варианта параметров: L1вых= 1361 и L2вых= 1633 м. для графиков функций (4) и (6) примем, что Lвых = 400 м, Lотпр = 1200 м. Графики рис. 3 построены для двух значени скорости Vn макс ,поэтому их условные обозначени соответствуют следующим примерам: t1изв1 и t2изв — расчету по выражению (З) для скоростей Vnмакс = 80 и 120 км/ч; t1изв1 и t2изв1 — по выражению (4) и тех же скоростей; t1изв1 и t2изв1 по выражению (6).
Анализ графиков рис. З определяет следующие закономерности поведения функций t изв = f( ∂ v ) .Графики t 1изв1 и t 2изв совпадают, так как два значения скорости Vnмакс подставляемые в выражение (2), приводят к получению соответствующих зависимых величин длин участков приближения L 1пр пер и L 2пр пер, находимых из (3). Сравнение графиков, построенных по выраженияи (4) и (6), показывает, что использование временной задержки (5) на открывание выходного светофора обусловливает меньшу степень увеличения t изв, с возрастанием ∂ v .
Как видно из приведенных графиков, влияние относительной скорости ∂ v на длительность времени извещения t изв значительно. Например, для выбранных при расчете параметров уменьшение реальной скорости по отношению к максимальной в 4 раза приводит к увеличению t изв, в 3-4 раза. Очевидно, что это вызывает существенные задержки автомобильного транспорта.
Уменьшения степени изменения времени t изв при движении поездов с различными скоростными характеристиками движения можно достичь путем введения в процесс работы переезда функционального канала, передающего в аппаратуру АПС сигнал временной задержки t зад на закрытие переезда. Она определяется скоростью поезда, вступающего на участок приближения. Если переезд находится в пределах станции или прилегает к ней, то возможно получение дополнительной информации о скорости из нескольких точек следования поезда (стрелочные секции, участок удаления и т.п.). Это дает возможность более точно определить скорость приближения поезда к переезду.
Информация о скорости движения поезда достаточно просто может быть получена из стандартных функциональных узлов КТС ЭССО. Структурная схема АПС с введением канала информации о скорости движения поезда приведена на рис. 4.
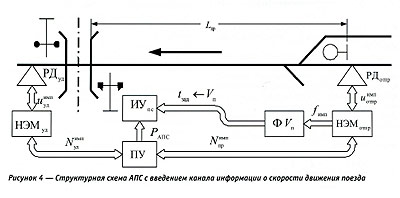
Здесь выходные импульсы НЭМпр, следующие с частотой f имп, поступают на вход формирователя Ф скорости Vn движения поезда. Очевидно, что при этом частота f имп однозначно определяет скорость следования поезда:

Это функциональное преобразование выполняется формирователем Ф, выходной сигнал t зад, которого управляет работой исполнительного устройства ИУпс обусловливая более оптимальное время закрытого состояния переезда.
Упрощенная схема рис. 4 показывает принципы функционирования АПС с регулируемой задержкой времени на закрытие переезда. Ее практическая реализация должна включать в себя выполнение соответствующих тяговых расчетов для конкретного участка пути и внесение их результатов в аппаратуру рассматриваемой АПС. Задача минимизации времени t изв, то есть увеличения точности прогнозируемого приближения поезда к переезду, повышается, если увеличивается количество точек определения скорости поезда на участке приближения и передачи этой информации на устройства АПС. Очевидно, что наибольшим приближением к наилучшему результату является непрерывная передача информации. Это может быть реализовано путем использования системы автоматической локомотивной сигнализации АЛС-Р.
Снижение длительности закрытого состояния переезда возможно путем функционального усложнения АПС с использованием КТС ЭССО. Практически это реализуется путем введения функции ускорения/замедления приближающегося поезда. Величина ускорения/замедления поезда может быть, как и значение скорости движения, получена программным путем из системы счета осей.
Таким образом, использование устройств КТС ЭССО позволяет решить проблемы создания оптимальных по времени извещения АПС, управляющих функционированием переездов, как на перегонах, так и на станциях. Использование принципиально новых подходов к методам управления АПС дает возможность уменьшить время извещения о подходе поезда к переезду и сократить время простоя автомобильного транспорта.
Литература
1. Устройства контроля свободности путевых участков методом счета осей с использованием аппаратуры ЭССО: Методические указания по проектированию устройств автоматики, телемеханики и связи на ж.д. транспорте. И —291—03. — СП6.: ГТСС, 2003. — 50 с.
2. Тильк И.Г., Ляной 8.8., Редров Ю.Ф. Системы счета осей на станции и перегоне//Железнодорожный транспорт. — 2005. — 9 — С. 46-50.
3. Кокурин И.М., Кондратенко Л.Ф. Эксплуатационные основы устройств железнодорожной автоматики и гаелемеханики. — М.: Транспорт, 1980. — 168 с.
ТРАНСПОРТ УРАЛА / М 2 (9) / 2006